





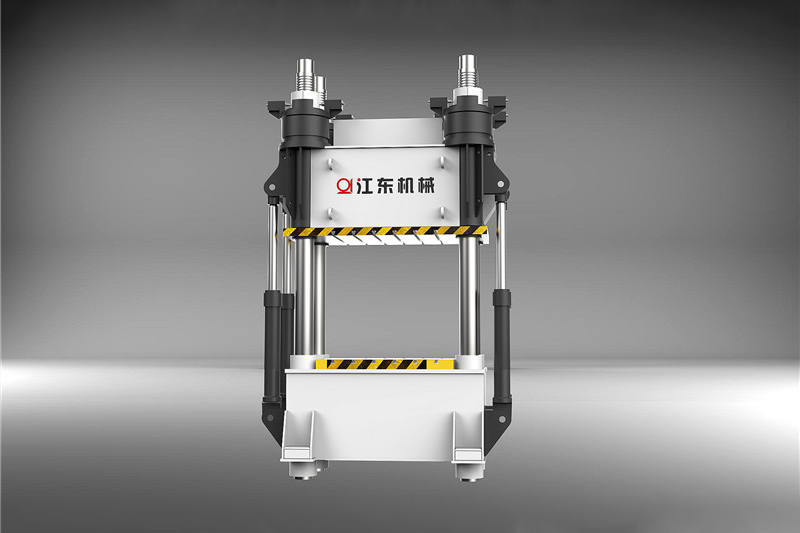
Пресси гидравликии композитӣ бо зарбаи кӯтоҳ
Бартариятҳои маҳсулот
Сохтори дуқабата:Пресси гидравликии мо сохтори душӯбаро истифода мебарад, ки дар муқоиса бо прессҳои анъанавии сешӯба устуворӣ ва дақиқии беҳтарро таъмин мекунад. Ин тарҳ самаранокӣ ва дақиқии умумии раванди шаклдиҳиро беҳтар мекунад ва натиҷаҳои якхеларо таъмин менамояд ва партовҳои маводро кам мекунад.
Баландии камшудаи мошин:Бо иваз кардани сохтори анъанавии сечӯба, пресси гидравликии мо баландии мошинро 25%-35% кам мекунад. Ин тарҳи паймон фазои арзишманди фаршро сарфа мекунад ва ҳамзамон қувва ва дарозии зарбаи заруриро барои ташаккули маводи композитӣ таъмин менамояд.
Диапазони зарбаи самаранок:Пресси гидравликӣ дорои диапазони зарбаи силиндр аз 50 то 120 мм мебошад. Ин диапазони бисёрҷониба талаботи шаклдиҳии маводҳои гуногуни композитӣ, аз ҷумла онҳоеро, ки дар равандҳо ба монанди HP-RTM, SMC, LFT-D, GMT ва дигарон истифода мешаванд, қонеъ мекунад. Имконияти танзими дарозии зарба имкон медиҳад, ки раванди қолабкунӣ дақиқ назорат карда шавад ва маҳсулоти босифат ва бе нуқсон таъмин карда шавад.
Системаи пешрафтаи идоракунӣ:Пресси гидравликии мо бо интерфейси экрани сенсорӣ ва системаи идоракунии PLC муҷаҳҳаз шудааст. Ин танзимоти интуитивӣ назорати қулайро аз болои параметрҳо, ба монанди ҳассосияти фишор ва ҳассосияти ҷойивазкунӣ, таъмин мекунад. Бо ин хусусиятҳо, операторҳо метавонанд раванди шаклдиҳиро ба осонӣ назорат ва танзим кунанд, то ба талаботи мушаххаси маҳсулот ҷавобгӯ бошанд ва ҳосилнокии умумиро афзоиш диҳанд.
Лавозимоти иловагӣ:Барои боз ҳам беҳтар кардани функсия ва автоматикунонии пресси гидравликии мо, мо лавозимоти иловагӣ, аз қабили системаи вакуумӣ, аробаҳои ивазкунии қолаб ва интерфейсҳои муоширати идоракунии электрониро пешниҳод менамоем. Системаи вакуумӣ ҳангоми раванди шаклдиҳӣ тозакунии самараноки ҳаво ва ифлосиҳоро таъмин мекунад, ки боиси беҳтар шудани сифати маҳсулот мегардад. Аробаҳои ивазкунии қолаб ивазкунии зуд ва бесамари қолабро осон мекунанд, вақти бекористиро кам мекунанд ва самаранокии умумии истеҳсолотро афзоиш медиҳанд. Интерфейсҳои муоширати идоракунии электронӣ имкон медиҳанд, ки пресси гидравликӣ бо хатҳои истеҳсолӣ бефосила ҳамгироӣ карда шавад ва имкон медиҳад, ки идоракунии автоматӣ ва назорат анҷом дода шавад.
Барномаҳои маҳсулот
Саноати аэрокосмӣ:Пресси гидравликии мо бо зарбаи кӯтоҳ дар саноати аэрокосмикӣ барои истеҳсоли маҳсулоти композитии сабуки бо нах тақвиятёфта васеъ истифода мешавад. Назорати дақиқи раванди қолабсозӣ ва қобилияти кор бо маводҳои гуногуни композитӣ онро барои истеҳсоли ҷузъҳои истифодашаванда дар соҳаҳои аэрокосмикӣ ба як роҳи ҳалли беҳтарин табдил медиҳад. Ин ҷузъҳо панелҳои дохилии ҳавопаймо, сохторҳои бол ва дигар қисмҳои сабукро дар бар мегиранд, ки ба мустаҳкамӣ ва устувории баланд ниёз доранд.
Саноати автомобилсозӣ:Бо афзоиши талабот ба мошинҳои сабук ва каммасрафи сӯзишворӣ, пресси гидравликии мо дар истеҳсоли маҳсулоти композитии бо нах тақвиятёфта, ки дар замимаҳои автомобилӣ истифода мешаванд, муҳим аст. Он имкон медиҳад, ки шаклдиҳии самараноки ҷузъҳо ба монанди панелҳои кузов, тақвияти сохторӣ ва қисмҳои дохилӣ анҷом дода шавад. Назорати дақиқи зарба ва системаи пешрафтаи идоракунӣ сифати доимии талаботро аз ҷониби истеҳсолкунандагони автомобил кафолат медиҳад.
Истеҳсоли умумӣ:Пресси гидравликии мо барои қонеъ кардани ниёзҳои гуногуни соҳаҳо берун аз соҳаи кайҳонӣ ва автомобилсозӣ кофӣ аст. Онро дар истеҳсоли маводҳои композитӣ барои истифодаҳо ба монанди молҳои варзишӣ, масолеҳи сохтмонӣ ва маҳсулоти истеъмолӣ истифода бурдан мумкин аст. Чандирӣ, дақиқӣ ва самаранокии он онро дар ҳама гуна муҳити истеҳсолӣ, ки дар он шаклдиҳии маводи композитӣ талаб карда мешавад, ба як воситаи ҳатмӣ табдил медиҳад.
Хулоса, пресси гидравликии кӯтоҳтағйирёбандаи мо самаранокӣ ва дақиқии баландро дар ташаккули маводҳои композитӣ пешниҳод мекунад. Бо сохтори дуқабата, баландии камшудаи мошин, диапазони бисёрҷабҳаи зарба ва системаи пешрафтаи идоракунӣ, он ба истеҳсолкунандагон роҳи ҳалли боэътимод ва самаранокро барои истеҳсоли маҳсулоти композитии баландсифат пешниҳод мекунад. Новобаста аз он ки дар соҳаҳои аэрокосмосӣ, автомобилӣ ё истеҳсоли умумӣ, пресси гидравликии мо дақиқӣ ва ҳосилнокии заруриро барои доираи васеи барномаҳо таъмин мекунад.


